
Relatório:
http://www.ebah.com.br/relatorio-projeto-arhte-2010-1-docx-a53487.html
ou
http://www.4shared.com/document/nziCnA2E/RELATORIO_FINAL.html
sexta-feira, 28 de maio de 2010
quinta-feira, 27 de maio de 2010
Plano de negócios
Plano de negócios :
http://www.ebah.com.br/plano-de-negocios-pdf-a53330.html
ou
http://www.4shared.com/document/WrartOta/Plano_de_negocios_equipe_notox.html
http://www.ebah.com.br/plano-de-negocios-pdf-a53330.html
ou
http://www.4shared.com/document/WrartOta/Plano_de_negocios_equipe_notox.html
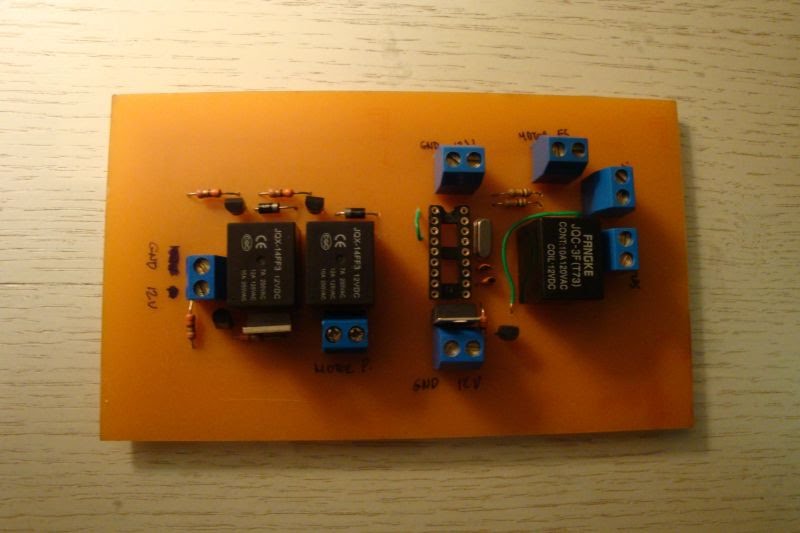
Mudança na parte eletrônica


Informamos que ao invez de utilizar uma ponte H apartir do componente l298, vamos utilizar apartir de 2 reles de 12 volts.
domingo, 16 de maio de 2010
sábado, 15 de maio de 2010
Código Fonte
Nesse semestre optamos por utilizar o PIC16F628A.
int motordaesteira(){
while(true){
if(input(pin_a1)==0){
output_low(pin_b4);
//fazer esperar tudo
return 0;
}
output_high(pin_b4);//mandar para o motor da esteira nivel logico alto ate o sensor detectar lata
if((input(pin_a0))== 0 ){
delay_ms (5000);//espera 5 segundos
output_low(pin_b4);
return 1;
}
}
}
int motordocompactador(){
//por pwm
if(input(pin_a1)==0){
output_low(pin_b3);//parar o compactador
output_low(pin_a3);//desliga o compactador;
//fazer esperar tudo
return 0;
}
output_high(pin_b3);//mandar valor logico alto para compactador descer
delay_ms (10000);//valor a definir
output_low(pin_b3);//parar o compactador
delay_ms (2000);//2 segundos
output_high(pin_a3);//mandar valor logico alto para compactador subir
delay_ms (10000);//valor a definir
output_low(pin_a3);//desliga o compactador;
return 2;
}
void main()
{
int aux=4;
setup_timer_0(RTCC_INTERNAL|RTCC_DIV_1);
setup_timer_1(T1_DISABLED);
setup_timer_2(T2_DIV_BY_16,77,1);
setup_comparator(NC_NC_NC_NC);
setup_vref(FALSE);
//Setup_Oscillator parameter not selected from Intr Oscillator Config tab
// TODO: USER CODE!!
while(true){//do pic
//liga motor da esteira
aux= motordaesteira();
if(aux==1){
//mandar compactador atuar
aux= motordocompactador();
}
if(aux==0){
//foi aberto a porta
//esperar ate que a mesma seja fechada
while((input(pin_a1))==0){
}
}
//compactou, retirou, necessario voltar ao normal
aux=4;
}
}
int motordaesteira(){
while(true){
if(input(pin_a1)==0){
output_low(pin_b4);
//fazer esperar tudo
return 0;
}
output_high(pin_b4);//mandar para o motor da esteira nivel logico alto ate o sensor detectar lata
if((input(pin_a0))== 0 ){
delay_ms (5000);//espera 5 segundos
output_low(pin_b4);
return 1;
}
}
}
int motordocompactador(){
//por pwm
if(input(pin_a1)==0){
output_low(pin_b3);//parar o compactador
output_low(pin_a3);//desliga o compactador;
//fazer esperar tudo
return 0;
}
output_high(pin_b3);//mandar valor logico alto para compactador descer
delay_ms (10000);//valor a definir
output_low(pin_b3);//parar o compactador
delay_ms (2000);//2 segundos
output_high(pin_a3);//mandar valor logico alto para compactador subir
delay_ms (10000);//valor a definir
output_low(pin_a3);//desliga o compactador;
return 2;
}
void main()
{
int aux=4;
setup_timer_0(RTCC_INTERNAL|RTCC_DIV_1);
setup_timer_1(T1_DISABLED);
setup_timer_2(T2_DIV_BY_16,77,1);
setup_comparator(NC_NC_NC_NC);
setup_vref(FALSE);
//Setup_Oscillator parameter not selected from Intr Oscillator Config tab
// TODO: USER CODE!!
while(true){//do pic
//liga motor da esteira
aux= motordaesteira();
if(aux==1){
//mandar compactador atuar
aux= motordocompactador();
}
if(aux==0){
//foi aberto a porta
//esperar ate que a mesma seja fechada
while((input(pin_a1))==0){
}
}
//compactou, retirou, necessario voltar ao normal
aux=4;
}
}
quinta-feira, 6 de maio de 2010
Parte Eletrônica


A equipe está quase terminando a parte eletrônica tendo a placa já realizada no Proteus ARES e ISIS.
Já compramos os dispositivos eletrônicos na praça da sé e no site SoldaFria.
Assinar:
Comentários (Atom)








